專(zhuān)屬前移式結(jié)構(gòu)設(shè)計(jì)
-
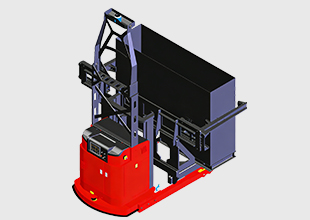
門(mén)架 / 叉臂機(jī)構(gòu)可前后伸縮:叉取貨物時(shí)前伸,搬運(yùn)時(shí)收回,讓貨物重心始終落在車(chē)體支撐范圍內(nèi),大幅提升重載搬運(yùn)的穩(wěn)定性,避免側(cè)翻。
-
窄通道作業(yè)優(yōu)勢(shì):無(wú)需車(chē)體完全駛?cè)胴浖?/ 工位,僅靠叉臂前伸即可完成取放,直角轉(zhuǎn)彎通道寬度遠(yuǎn)小于平衡重式 AGV,大幅提升倉(cāng)儲(chǔ)空間利用率,適配高密度立體庫(kù)。
-
定制化叉臂 / 夾抱機(jī)構(gòu):圖中為適配大尺寸、異形箱體 / 板材的專(zhuān)用叉臂 / 側(cè)夾結(jié)構(gòu),區(qū)別于標(biāo)準(zhǔn)托盤(pán)貨叉,可直接夾持 / 托舉無(wú)托盤(pán)的大件貨物,避免托盤(pán)占用,適配特殊物料搬運(yùn)需求。
導(dǎo)航與智能控制
-
流采用激光 SLAM 自然導(dǎo)航(部分型號(hào)支持磁條 / 二維碼輔助),無(wú)需改造現(xiàn)場(chǎng)環(huán)境,自主建圖定位,定位精度可達(dá) ±5~±10mm,精準(zhǔn)停靠貨架 / 工位。
-
集成工業(yè)級(jí) PLC 控制系統(tǒng) + 高精度位移傳感器,可精準(zhǔn)控制叉臂伸縮、舉升高度,支持自動(dòng)識(shí)別貨物位置、自適應(yīng)對(duì)中,實(shí)現(xiàn)全流程無(wú)人化作業(yè)。
-
可無(wú)縫接入 WMS/WCS/ERP 調(diào)度系統(tǒng),支持多 AGV 協(xié)同、路徑動(dòng)態(tài)規(guī)劃、交通管制,適配智能工廠 / 無(wú)人倉(cāng)儲(chǔ)的自動(dòng)化需求。